MUJICA: Multi-skill Unified Joint Integration of Control Architecture for Wheeled-Legged Robots
Abstract
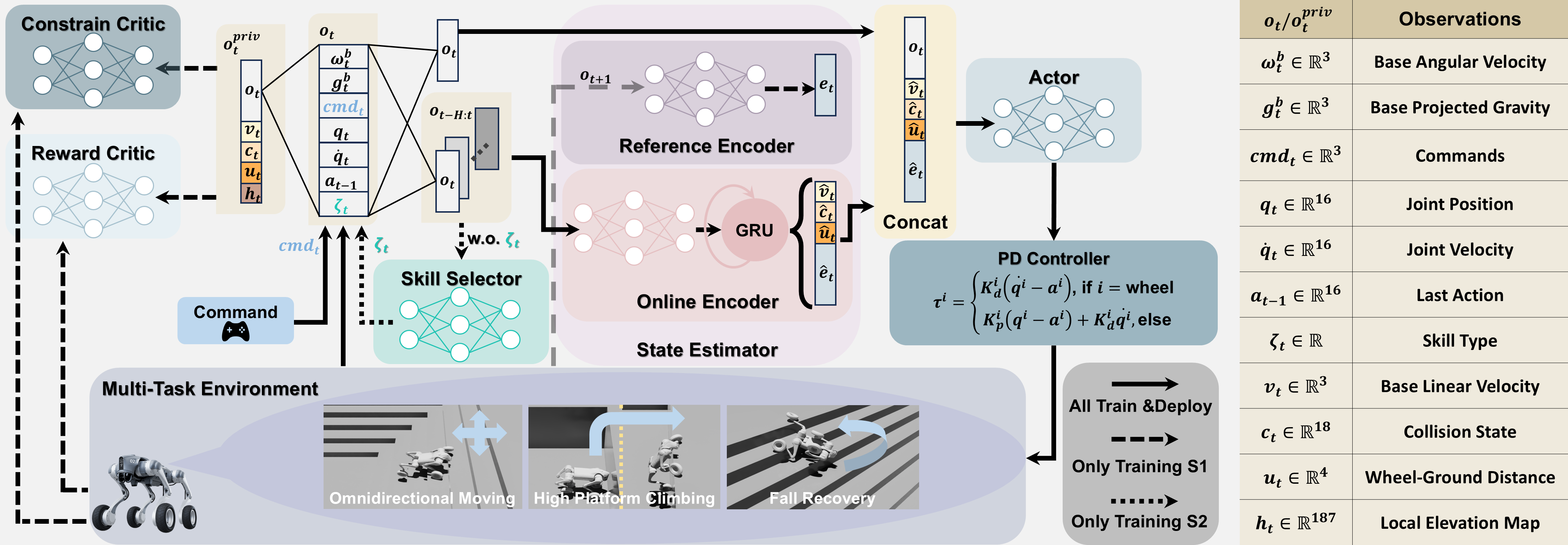
Wheeled-legged robots hold promise for traversing complex terrains and offer superior mobility compared to legged robots. However, wheeled-legged robots must effectively balance both wheeled driving and legged control. Furthermore, due to noisy proprioceptive sensing and real-world motor constraints, realizing robust and adaptive locomotion at peak performance of motors remains challenging. We propose the Multi-skill Unified Joint Integration of Control Architecture (MUJICA), a unified, fully proprioceptive control framework for wheeled-legged robots that integrates diverse low-level skills—including omnidirectional moving, high platform climbing, and fall recovery—within a single policy. All skills, distinguished by unique indicator variables, are trained jointly with accurate DC-motor constraint modeling. Additionally, a high-level skill selector is learned to dynamically choose the optimal skill based solely on proprioceptions, enabling adaptive responses to the surrounding environment. Therefore, MUJICA enhances sim-to-real robustness and enables seamless transitions across diverse locomotion modes, facilitating autonomous adjustment to the environment. We validate our framework in both simulation and real-world experiments on the Unitree Go2-W robot, demonstrating significant improvements in adaptability and task success in unstructured environments.
Training in Isaac Sim
Omnidirectional Moving
Fall Recovery
High Platform Climbing
50cm platform
80cm platform
70cm outdoor platform
100cm indoor platform
50cm rock (MUJICA)
50cm rock (Baseline, ×2 speed)
Automatic Skill Selector
Demo on IROS 2025 Quadruped Robot Challenge
BibTeX
@misc{li2026mujicamultiskillunifiedjoint,
title={MUJICA: Multi-skill Unified Joint Integration of Control Architecture for Wheeled-Legged Robots},
author={Yuqi Li and Peng Zhai and Yueqi Zhang and Xiaoyi Wei and Quancheng Qian and Zhengxu He and Qianxiang Yu and Lihua Zhang},
year={2026},
eprint={2605.13058},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2605.13058},
}